 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Long-Context Modeling in Diffusion Language Models via Block Approximate Sparse Attention
May 19, 2026Diffusion Language Models (DLMs) enable globally coherent, bidirectional, and controllable text generation, offering advantages over traditional autoregressive LLMs, while scaling to ultra-long sequences remains costly. Many existing block-sparse attention methods select blocks by fixed sampling patterns over the high-resolution attention space, such as tail regions or anti-diagonal stripes. Such prior-driven sampling can miss salient tokens and introduce instability under distribution shifts. In this paper, we propose the Block Approximate Sparse Attention framework (BA-Att) with block-wise pre-downsampled operation, which identifies informative regions within a compact downsampled space, avoiding reliance on brittle positional priors. To analyze its theoretical behavior, we define an oracle post-downsample attention map and formalize the approximation error between pre- and post-downsample schemes. Based on this insight, we introduce a lightweight norm-sorting module and a covariance-compensated correction that approximates full covariance using diagonal QK variances, reducing computational complexity. Extensive experiments show that our operator achieves up to 6.95x acceleration over FlashAttention in attention computation, and maintains near full-attention performance at 50% sparsity across language models, multimodal language models, and video generation models, demonstrating strong efficiency and generalization.
Agentic World Modeling: Foundations, Capabilities, Laws, and Beyond
Apr 24, 2026As AI systems move from generating text to accomplishing goals through sustained interaction, the ability to model environment dynamics becomes a central bottleneck. Agents that manipulate objects, navigate software, coordinate with others, or design experiments require predictive environment models, yet the term world model carries different meanings across research communities. We introduce a "levels x laws" taxonomy organized along two axes. The first defines three capability levels: L1 Predictor, which learns one-step local transition operators; L2 Simulator, which composes them into multi-step, action-conditioned rollouts that respect domain laws; and L3 Evolver, which autonomously revises its own model when predictions fail against new evidence. The second identifies four governing-law regimes: physical, digital, social, and scientific. These regimes determine what constraints a world model must satisfy and where it is most likely to fail. Using this framework, we synthesize over 400 works and summarize more than 100 representative systems spanning model-based reinforcement learning, video generation, web and GUI agents, multi-agent social simulation, and AI-driven scientific discovery. We analyze methods, failure modes, and evaluation practices across level-regime pairs, propose decision-centric evaluation principles and a minimal reproducible evaluation package, and outline architectural guidance, open problems, and governance challenges. The resulting roadmap connects previously isolated communities and charts a path from passive next-step prediction toward world models that can simulate, and ultimately reshape, the environments in which agents operate.
StarVLA-$α$: Reducing Complexity in Vision-Language-Action Systems
Apr 13, 2026Vision-Language-Action (VLA) models have recently emerged as a promising paradigm for building general-purpose robotic agents. However, the VLA landscape remains highly fragmented and complex: as existing approaches vary substantially in architectures, training data, embodiment configurations, and benchmark-specific engineering. In this work, we introduce StarVLA-$α$, a simple yet strong baseline designed to study VLA design choices under controlled conditions. StarVLA-$α$ deliberately minimizes architectural and pipeline complexity to reduce experimental confounders and enable systematic analysis. Specifically, we re-evaluate several key design axes, including action modeling strategies, robot-specific pretraining, and interface engineering. Across unified multi-benchmark training on LIBERO, SimplerEnv, RoboTwin, and RoboCasa, the same simple baseline remains highly competitive, indicating that a strong VLM backbone combined with minimal design is already sufficient to achieve strong performance without relying on additional architectural complexity or engineering tricks. Notably, our single generalist model outperforms $π_{0.5}$ by 20\% on the public real-world RoboChallenge benchmark. We expect StarVLA-$α$ to serve as a solid starting point for future research in the VLA regime. Code will be released at https://github.com/starVLA/starVLA.
Consistency Beyond Contrast: Enhancing Open-Vocabulary Object Detection Robustness via Contextual Consistency Learning
Mar 27, 2026Recent advances in open-vocabulary object detection focus primarily on two aspects: scaling up datasets and leveraging contrastive learning to align language and vision modalities. However, these approaches often neglect internal consistency within a single modality, particularly when background or environmental changes occur. This lack of consistency leads to a performance drop because the model struggles to detect the same object in different scenes, which reveals a robustness gap. To address this issue, we introduce Contextual Consistency Learning (CCL), a novel framework that integrates two key strategies: Contextual Bootstrapped Data Generation (CBDG) and Contextual Consistency Loss (CCLoss). CBDG functions as a data generation mechanism, producing images that contain the same objects across diverse backgrounds. This is essential because existing datasets alone do not support our CCL framework. The CCLoss further enforces the invariance of object features despite environmental changes, thereby improving the model's robustness in different scenes. These strategies collectively form a unified framework for ensuring contextual consistency within the same modality. Our method achieves state-of-the-art performance, surpassing previous approaches by +16.3 AP on OmniLabel and +14.9 AP on D3. These results demonstrate the importance of enforcing intra-modal consistency, significantly enhancing model generalization in diverse environments. Our code is publicly available at: https://github.com/bozhao-li/CCL.
Multimodal Dataset Distillation via Phased Teacher Models
Mar 26, 2026Multimodal dataset distillation aims to construct compact synthetic datasets that enable efficient compression and knowledge transfer from large-scale image-text data. However, existing approaches often fail to capture the complex, dynamically evolving knowledge embedded in the later training stages of teacher models. This limitation leads to degraded student performance and compromises the quality of the distilled data. To address critical challenges such as pronounced cross-stage performance gaps and unstable teacher trajectories, we propose Phased Teacher Model with Shortcut Trajectory (PTM-ST) -- a novel phased distillation framework. PTM-ST leverages stage-aware teacher modeling and a shortcut-based trajectory construction strategy to accurately fit the teacher's learning dynamics across distinct training phases. This enhances both the stability and expressiveness of the distillation process. Through theoretical analysis and comprehensive experiments, we show that PTM-ST significantly mitigates optimization oscillations and inter-phase knowledge gaps, while also reducing storage overhead. Our method consistently surpasses state-of-the-art baselines on Flickr30k and COCO, achieving up to 13.5% absolute improvement and an average gain of 9.53% on Flickr30k. Code: https://github.com/Previsior/PTM-ST.
VisionDirector: Vision-Language Guided Closed-Loop Refinement for Generative Image Synthesis
Dec 22, 2025Generative models can now produce photorealistic imagery, yet they still struggle with the long, multi-goal prompts that professional designers issue. To expose this gap and better evaluate models' performance in real-world settings, we introduce Long Goal Bench (LGBench), a 2,000-task suite (1,000 T2I and 1,000 I2I) whose average instruction contains 18 to 22 tightly coupled goals spanning global layout, local object placement, typography, and logo fidelity. We find that even state-of-the-art models satisfy fewer than 72 percent of the goals and routinely miss localized edits, confirming the brittleness of current pipelines. To address this, we present VisionDirector, a training-free vision-language supervisor that (i) extracts structured goals from long instructions, (ii) dynamically decides between one-shot generation and staged edits, (iii) runs micro-grid sampling with semantic verification and rollback after every edit, and (iv) logs goal-level rewards. We further fine-tune the planner with Group Relative Policy Optimization, yielding shorter edit trajectories (3.1 versus 4.2 steps) and stronger alignment. VisionDirector achieves new state of the art on GenEval (plus 7 percent overall) and ImgEdit (plus 0.07 absolute) while producing consistent qualitative improvements on typography, multi-object scenes, and pose editing.
VisionThink: Smart and Efficient Vision Language Model via Reinforcement Learning
Jul 17, 2025Recent advancements in vision-language models (VLMs) have improved performance by increasing the number of visual tokens, which are often significantly longer than text tokens. However, we observe that most real-world scenarios do not require such an extensive number of visual tokens. While the performance drops significantly in a small subset of OCR-related tasks, models still perform accurately in most other general VQA tasks with only 1/4 resolution. Therefore, we propose to dynamically process distinct samples with different resolutions, and present a new paradigm for visual token compression, namely, VisionThink. It starts with a downsampled image and smartly decides whether it is sufficient for problem solving. Otherwise, the model could output a special token to request the higher-resolution image. Compared to existing Efficient VLM methods that compress tokens using fixed pruning ratios or thresholds, VisionThink autonomously decides whether to compress tokens case by case. As a result, it demonstrates strong fine-grained visual understanding capability on OCR-related tasks, and meanwhile saves substantial visual tokens on simpler tasks. We adopt reinforcement learning and propose the LLM-as-Judge strategy to successfully apply RL to general VQA tasks. Moreover, we carefully design a reward function and penalty mechanism to achieve a stable and reasonable image resize call ratio. Extensive experiments demonstrate the superiority, efficiency, and effectiveness of our method. Our code is available at https://github.com/dvlab-research/VisionThink.
Mitigating Object Hallucinations via Sentence-Level Early Intervention
Jul 16, 2025Multimodal large language models (MLLMs) have revolutionized cross-modal understanding but continue to struggle with hallucinations - fabricated content contradicting visual inputs. Existing hallucination mitigation methods either incur prohibitive computational costs or introduce distribution mismatches between training data and model outputs. We identify a critical insight: hallucinations predominantly emerge at the early stages of text generation and propagate through subsequent outputs. To address this, we propose **SENTINEL** (**S**entence-level **E**arly i**N**tervention **T**hrough **IN**-domain pr**E**ference **L**earning), a framework that eliminates dependency on human annotations. Specifically, we first bootstrap high-quality in-domain preference pairs by iteratively sampling model outputs, validating object existence through cross-checking with two open-vocabulary detectors, and classifying sentences into hallucinated/non-hallucinated categories. Subsequently, we use context-coherent positive samples and hallucinated negative samples to build context-aware preference data iteratively. Finally, we train models using a context-aware preference loss (C-DPO) that emphasizes discriminative learning at the sentence level where hallucinations initially manifest. Experimental results show that SENTINEL can reduce hallucinations by over 90\% compared to the original model and outperforms the previous state-of-the-art method on both hallucination benchmarks and general capabilities benchmarks, demonstrating its superiority and generalization ability. The models, datasets, and code are available at https://github.com/pspdada/SENTINEL.
Omni-DPO: A Dual-Perspective Paradigm for Dynamic Preference Learning of LLMs
Jun 11, 2025Direct Preference Optimization (DPO) has become a cornerstone of reinforcement learning from human feedback (RLHF) due to its simplicity and efficiency. However, existing DPO-based approaches typically treat all preference pairs uniformly, ignoring critical variations in their inherent quality and learning utility, leading to suboptimal data utilization and performance. To address this challenge, we propose Omni-DPO, a dual-perspective optimization framework that jointly accounts for (1) the inherent quality of each preference pair and (2) the model's evolving performance on those pairs. By adaptively weighting samples according to both data quality and the model's learning dynamics during training, Omni-DPO enables more effective training data utilization and achieves better performance. Experimental results on various models and benchmarks demonstrate the superiority and generalization capabilities of Omni-DPO. On textual understanding tasks, Gemma-2-9b-it finetuned with Omni-DPO beats the leading LLM, Claude 3 Opus, by a significant margin of 6.7 points on the Arena-Hard benchmark. On mathematical reasoning tasks, Omni-DPO consistently outperforms the baseline methods across all benchmarks, providing strong empirical evidence for the effectiveness and robustness of our approach. Code and models will be available at https://github.com/pspdada/Omni-DPO.
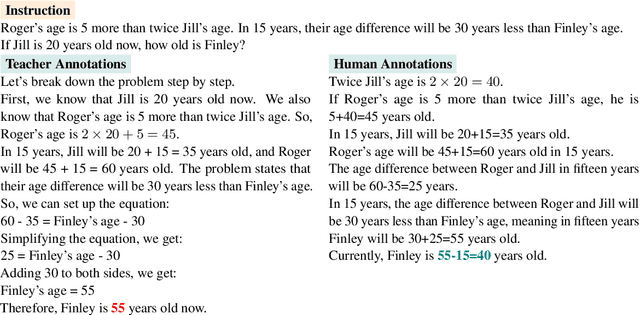
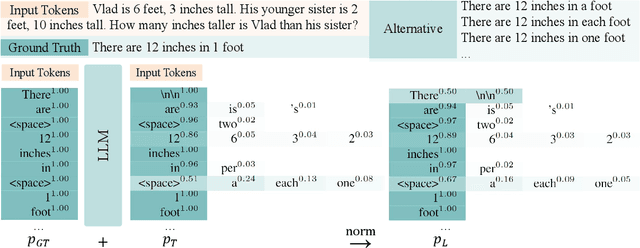
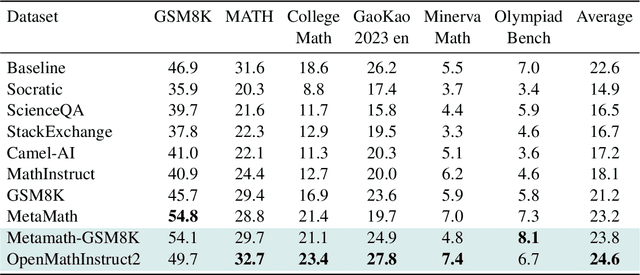
Logits-Based Finetuning
May 30, 2025
The core of out-of-distribution (OOD) detection is to learn the in-distribution (ID) representation, which is distinguishable from OOD samples. Previous work applied recognition-based methods to learn the ID features, which tend to learn shortcuts instead of comprehensive representations. In this work, we find surprisingly that simply using reconstruction-based methods could boost the performance of OOD detection significantly. We deeply explore the main contributors of OOD detection and find that reconstruction-based pretext tasks have the potential to provide a generally applicable and efficacious prior, which benefits the model in learning intrinsic data distributions of the ID dataset. Specifically, we take Masked Image Modeling as a pretext task for our OOD detection framework (MOOD). Without bells and whistles, MOOD outperforms previous SOTA of one-class OOD detection by 5.7%, multi-class OOD detection by 3.0%, and near-distribution OOD detection by 2.1%. It even defeats the 10-shot-per-class outlier exposure OOD detection, although we do not include any OOD samples for our detection. Codes are available at https://github.com/JulietLJY/MOOD.